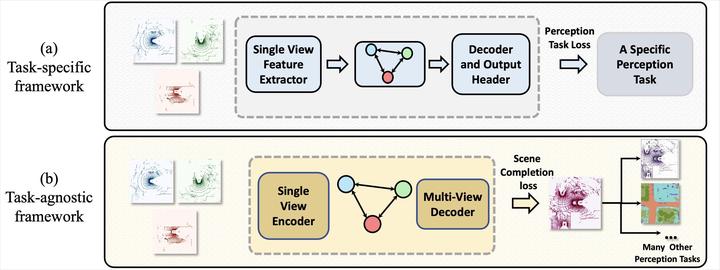
Multi-Robot Scene Completion: Towards Task-Agnostic Collaborative Perception Yiming Li*, Juexiao Zhang*, Dekun Ma, Yue Wang, Chen Feng Go to Project Site PDF Code Project 1 2 5 7 Chen Feng Associate Professor at NYU