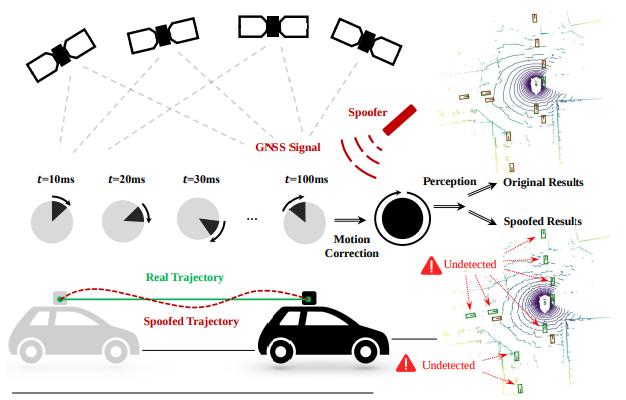
Fooling LiDAR Perception via Adversarial Trajectory Perturbation Yiming Li, Congcong Wen, Felix Juefei-Xu, Chen Feng Go to Project Site PDF Code Project 1 2 5 7 Chen Feng Associate Professor at NYU