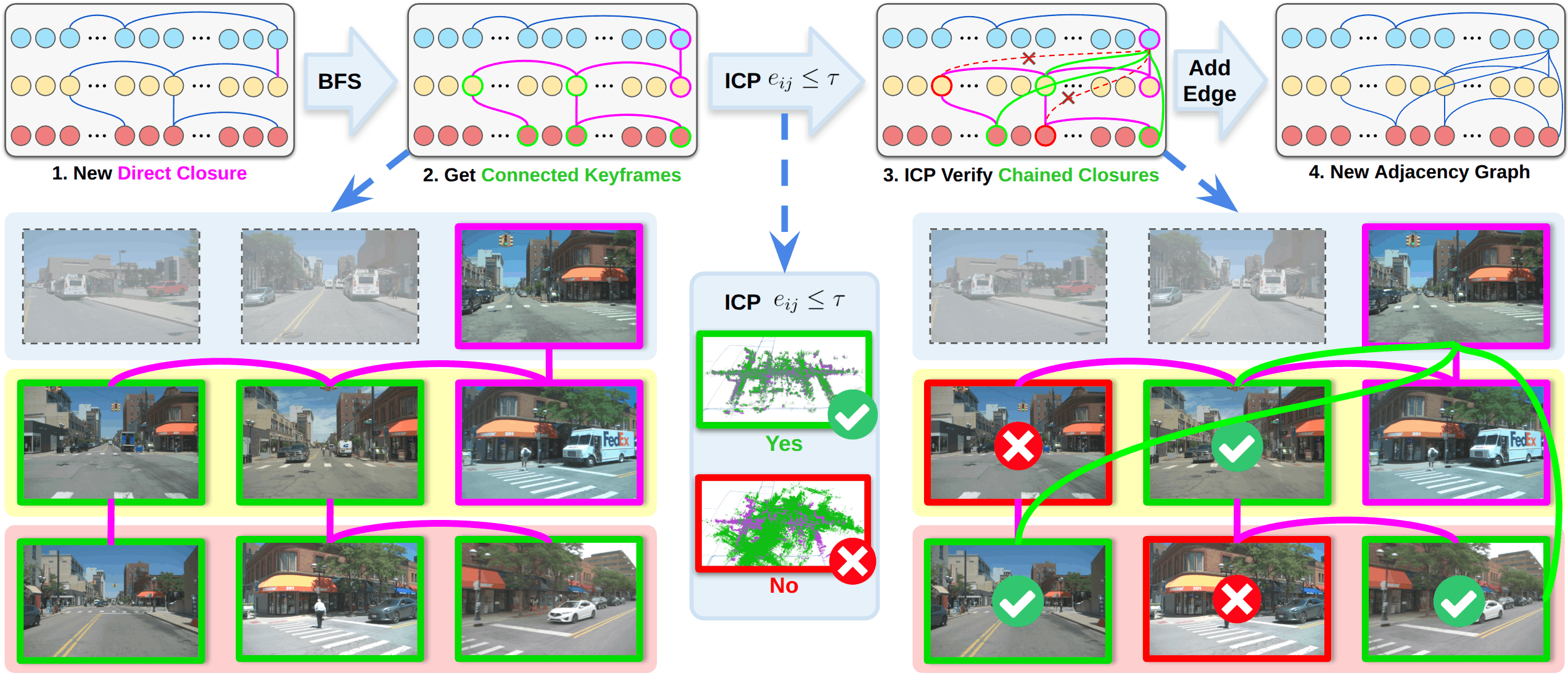
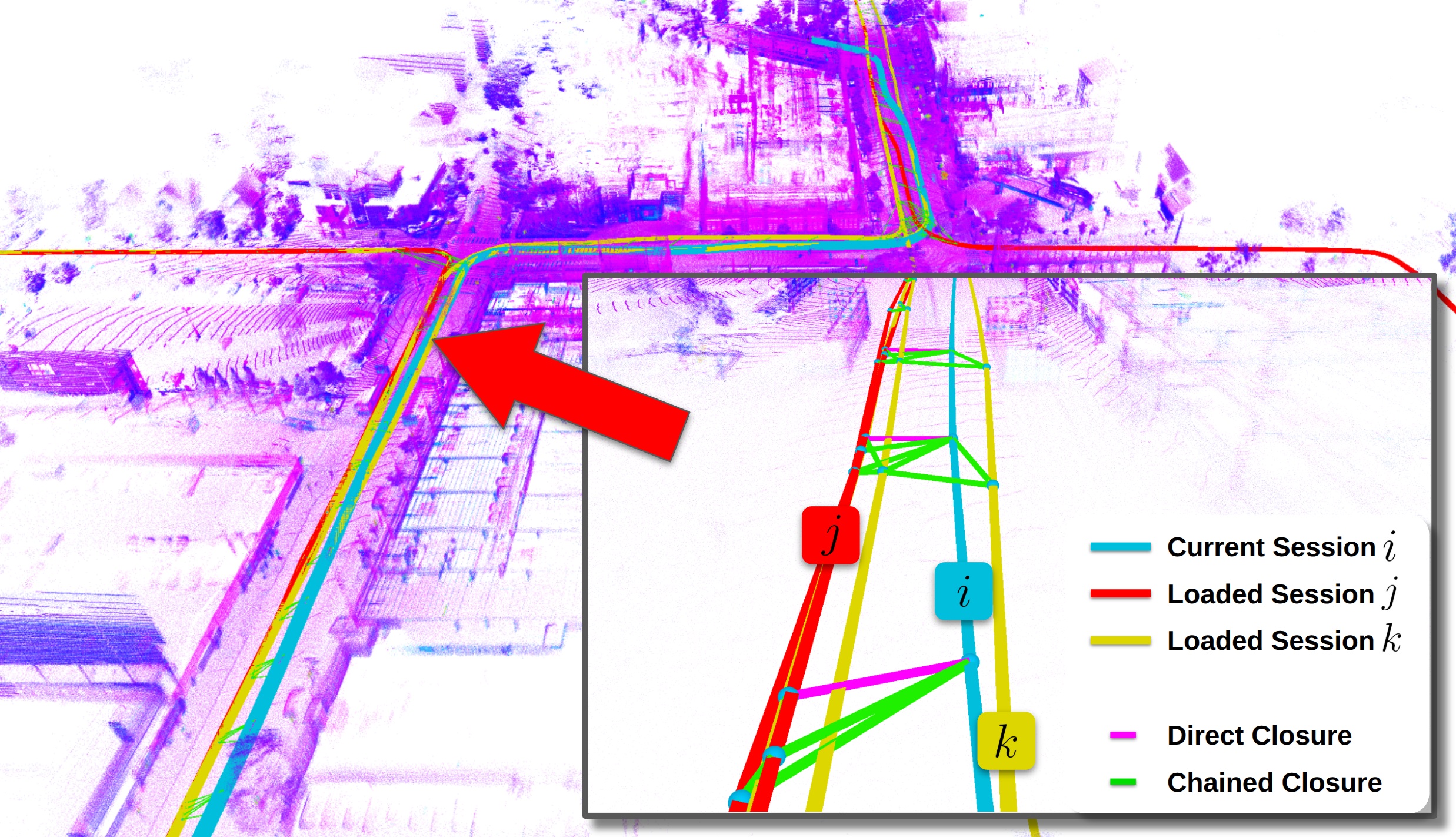
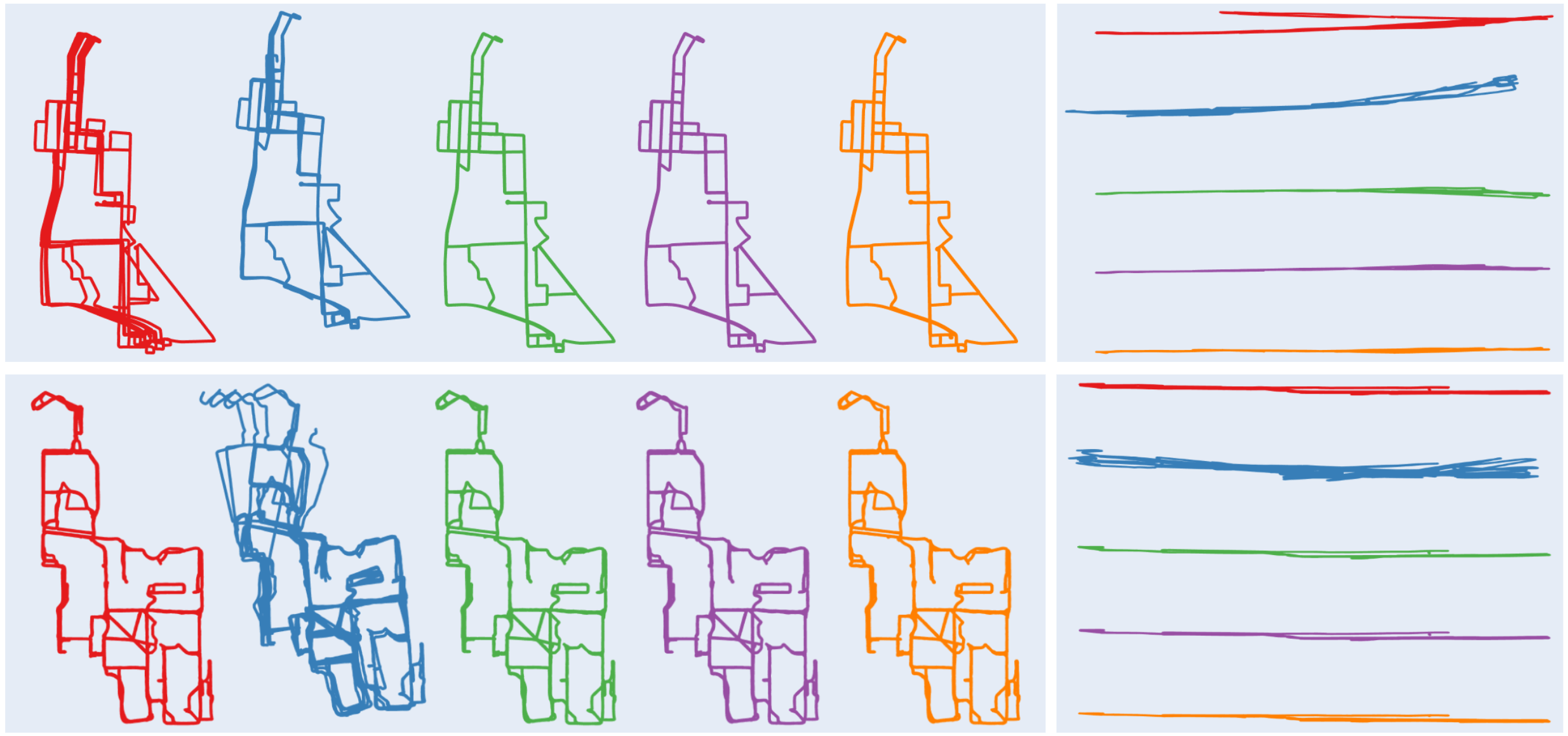
Maintaining consistency over long spatial and temporal horizons remains a fundamental challenge in large-scale LiDAR SLAM, particularly when integrating maps collected across multiple sessions. We present Chain-SLAM, a LiDAR SLAM backend enabling online multi-session map alignment and reuse with global consistency at large scale. We implement a chained loop closure mechanism that efficiently propagates geometric constraints across inter-session keyframes through an adjacency graph, enabling robust long-horizon consistency triggered by reliable short-horizon loop closures. The system initializes inter-session alignment with GNSS-proximity place recognition, then performs on-the-fly loop closure detection and joint optimization of loaded maps and newly acquired trajectories within a unified factor graph, maintaining both inter- and intra-session geometric consistency without dynamic object removal, and cross-platform robustness with minimal hyperparameter tuning. Experimental results show improved trajectory accuracy and robust multi-session integration on large-scale datasets. We release our source code to support reproducible research in large-scale multi-session LiDAR SLAM.
@inproceedings{li2026chainslam,
title = {Chain-SLAM: Globally Consistent Backend for Multi-Session LiDAR SLAM via Chained Loop Closure},
author = {Li, Zhiheng and Liu, Xinhao and Zhang, Juexiao and Liang, Yongqing and Feng, Chen},
booktitle = {IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
year = {2026}
}